

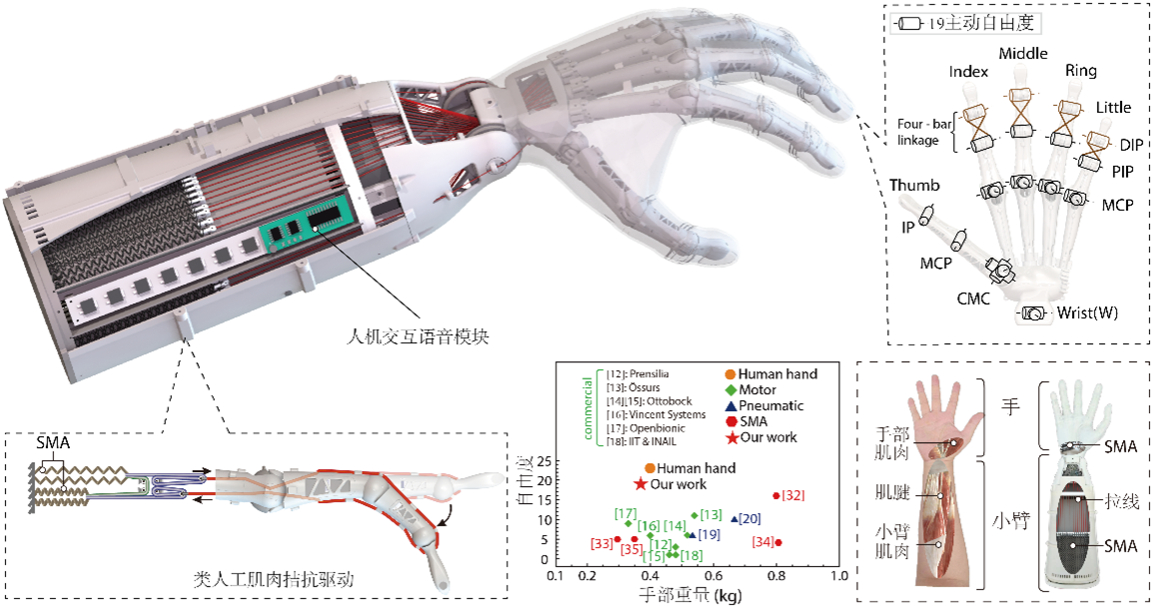
中国科学技术大学成功研发出具有19自由度的高仿真灵巧手,这一创新成果引领智能机器人进入新时代。该灵巧手设计精细,具备高度自主性和适应性,可模拟人类手部复杂动作。其研发将极大促进智能机器人在日常生活、工业生产等领域的应用,有望为人们的日常生活带来极大便利。
本文目录导读:
随着科技的飞速发展,智能机器人技术已成为全球科研领域的研究热点,智能机器人的研发和应用,对于提高生产效率、改善人民生活质量、应对老龄化社会等方面具有重要意义,仿生灵巧手作为智能机器人的核心部件之一,其性能直接影响到机器人的智能化程度和操作灵活性,中国科学技术大学(中国科大)宣布成功研发出具有19自由度的仿生灵巧手,这一创新成果在智能机器人领域引起了广泛关注。
背景
仿生灵巧手是智能机器人领域中一个极具挑战性的研究方向,传统的机器人抓手在设计上存在着灵活性不足、适应性差等问题,无法满足复杂环境下的操作需求,为了突破这些限制,科研人员致力于研发具有高度灵活性和适应性的仿生灵巧手,仿生灵巧手的设计涉及到机械工程、电子工程、计算机科学等多个学科领域,是一个高度集成的综合性研究课 题。
中国科大仿生灵巧手的研发历程
中国科大在仿生灵巧手研究领域一直走在国际前列,此次成功研发的19自由度仿生灵巧手,是在前期研究的基础上,通过不断创新和攻关,实现的一项重要突破。
1、研发团队的组成及分工:中国科大仿生灵巧手研发团队由机械与汽车工程学院、电子科学与技术学院、计算机科学与技术等学院的专家教授组成,团队成员在机械工程、电子工程、计算机科学等领域有着丰富的经验和专业知识,为项目的成功实施提供了有力保障。
2、技术攻关与创新:在研发过程中,团队面临了诸多技术挑战,如如何实现高度灵活性、如何提高适应性、如何保证稳定性等问题,通过深入研究和分析,团队创新性地采用了柔性关节设计、高精度传感器和先进的控制算法等技术,成功实现了仿生灵巧手的19自由度运动。
3、实验与验证:为了确保仿生灵巧手的性能达到预期,团队进行了大量的实验和验证工作,在实验过程中,团队对仿生灵巧手的灵活性、适应性、稳定性等方面进行了全面测试,并与其他研究机构进行了对比,证明了其优越性。
19自由度仿生灵巧手的特点与优势
1、高度灵活性:19自由度仿生灵巧手具有高度的灵活性,可以完成复杂的操作任务,其运动范围广泛,可以模拟人类手指的精细动作,为实现智能机器人的高度智能化提供支持。
2、强大的适应性:仿生灵巧手具有强大的适应性,可以在不同的环境下完成操作任务,无论是在工业生产、医疗康复还是空间探索等领域,都能发挥重要作用。
3、精确的控制:通过先进的控制算法和传感器技术,仿生灵巧手可以实现精确的运动控制,这使得机器人能够完成高精度的操作任务,提高生产效率和产品质量。
4、广泛的应用前景:19自由度仿生灵巧手在智能机器人领域具有广泛的应用前景,在工业生产中,可以提高生产效率;在医疗康复领域,可以帮助患者进行精细康复训练;在空间探索领域,可以完成复杂的操作任务。
中国科大成功研发出具有19自由度的仿生灵巧手,这一成果标志着我国在智能机器人领域取得了重要突破,仿生灵巧手的高度灵活性、强大适应性和精确控制等特点,为智能机器人的广泛应用提供了有力支持,随着技术的不断进步和应用的深入,仿生灵巧手将在智能机器人领域发挥更加重要的作用,为人类的生产和生活带来更多便利。
 苏ICP备2021047723号-1
苏ICP备2021047723号-1
还没有评论,来说两句吧...